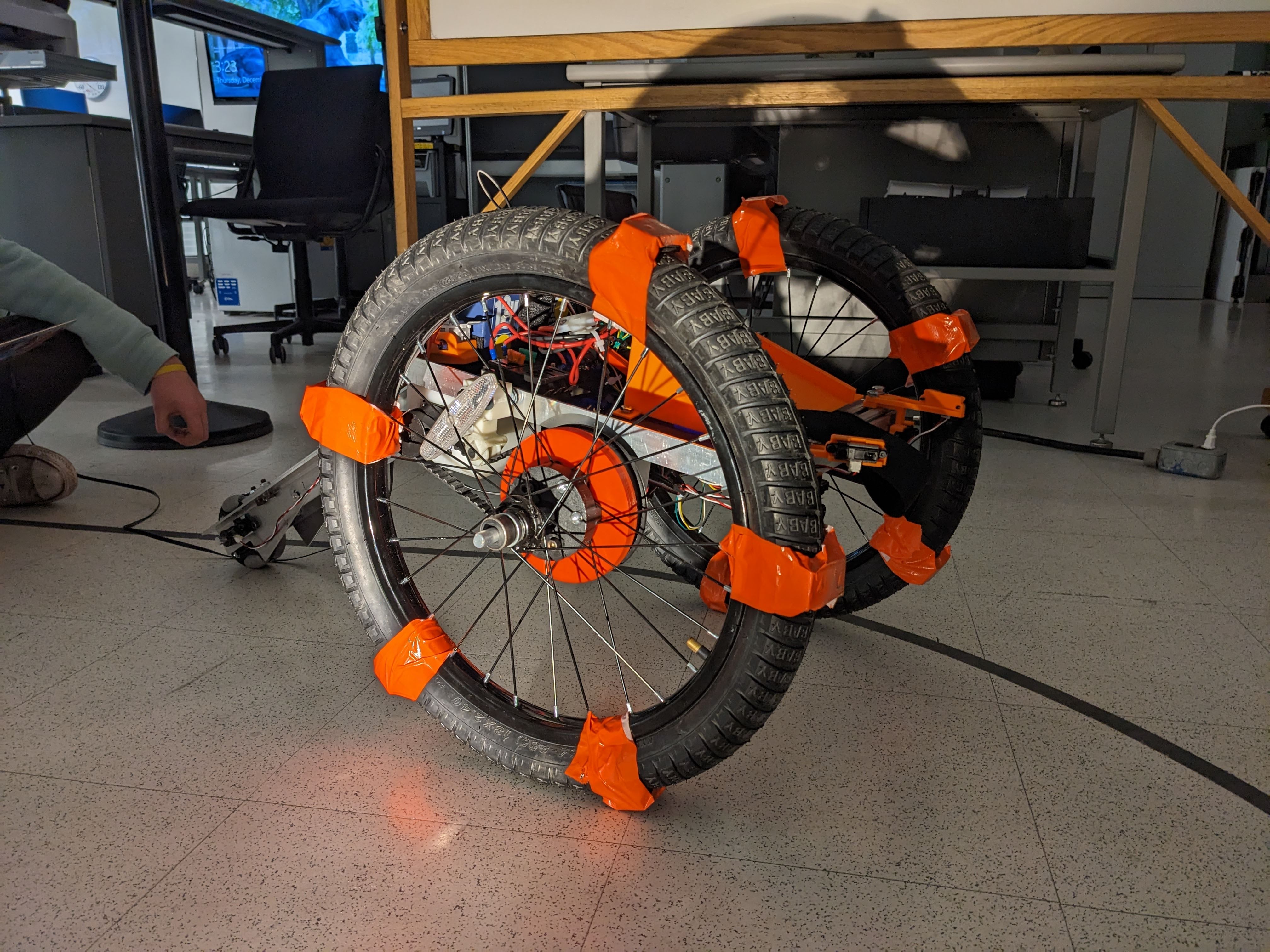
Nosenbot Search & Rescue Robot (SARR)
A SaRR capable of autonomously navigating an obstacle course and delivering a medkit to a target.
What?
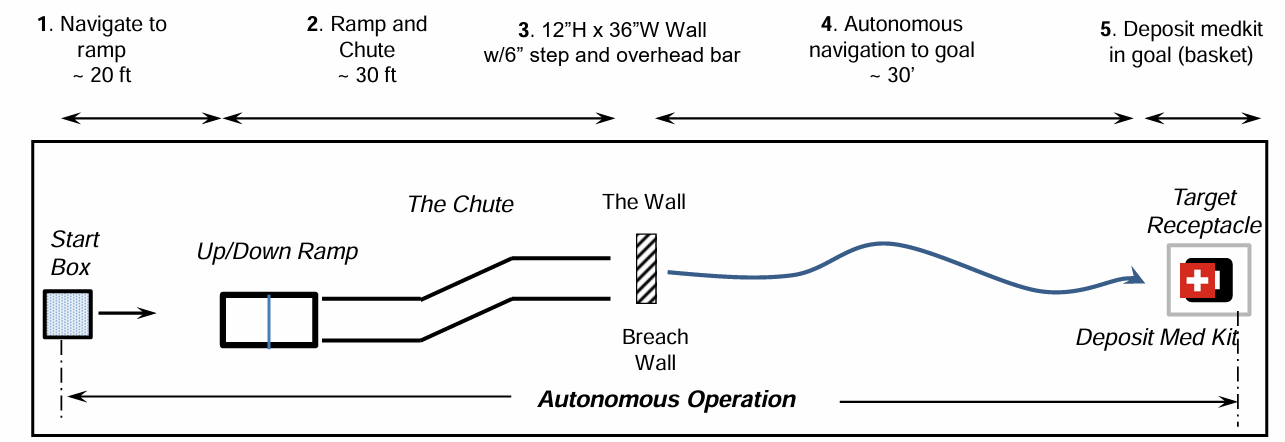
- Search and rescue robot designed to autonomously navigate an obstacle course and deliver a medical kit to a target
How?
- Formulated design scheme using hand calculations and prototype tests to determine dimensions, materials, and assembly
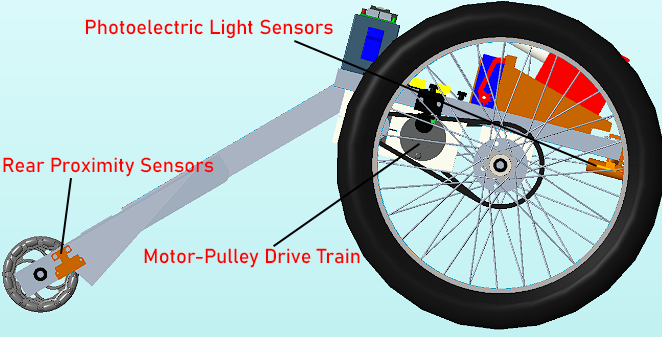
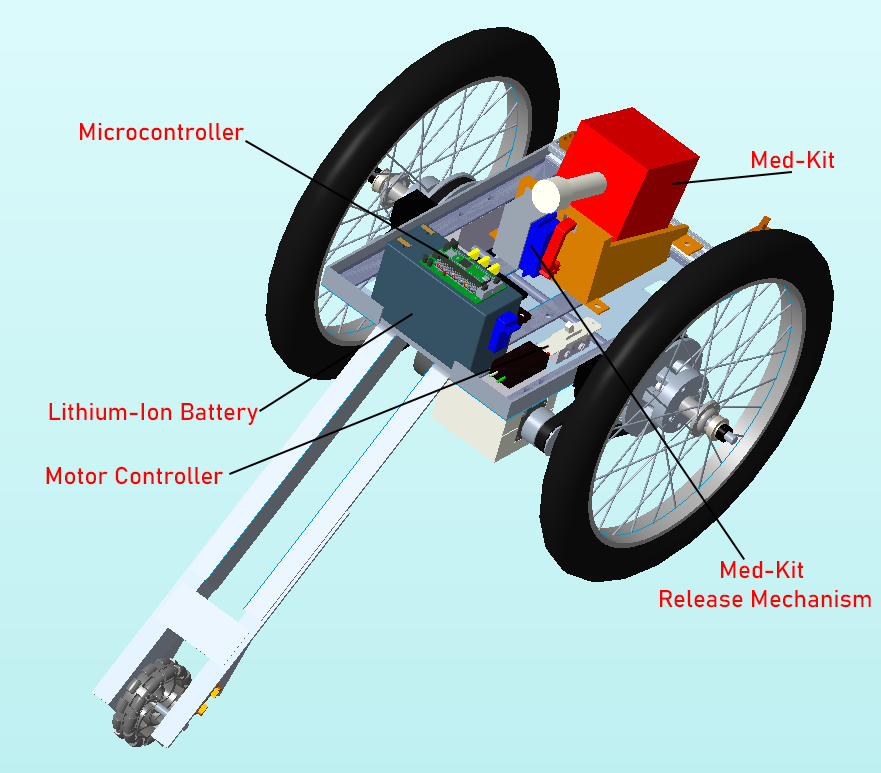
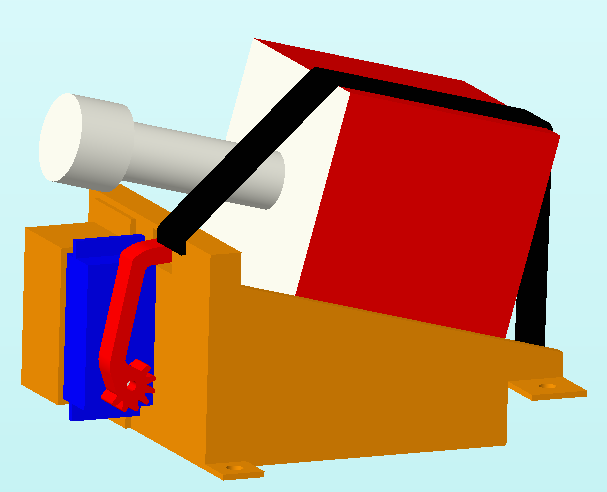
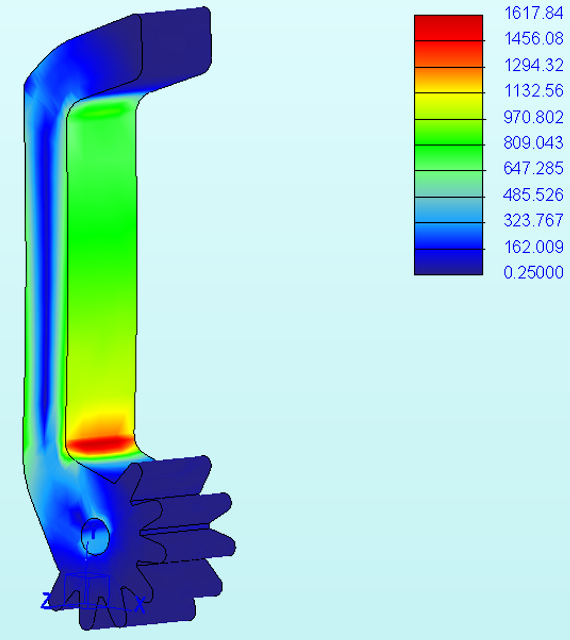
- Produced 3D CAD models in Creo then used static FEA analysis to optimize individual components
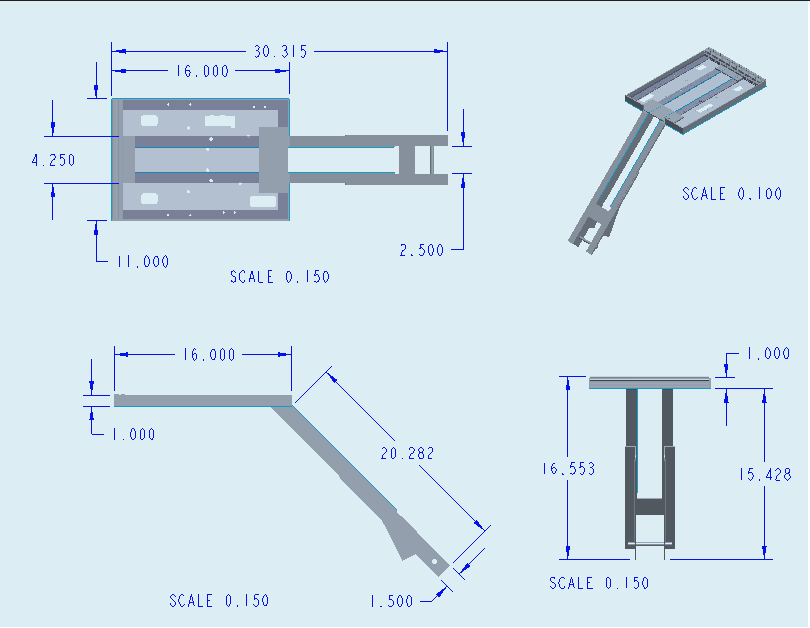
- Produced 2D engineering drawings of mechanical subsystems (chassic, drivetrain, medkit delivery)
- Fabricated parts via machining (lathe, drill press, band saw) and 3D printing
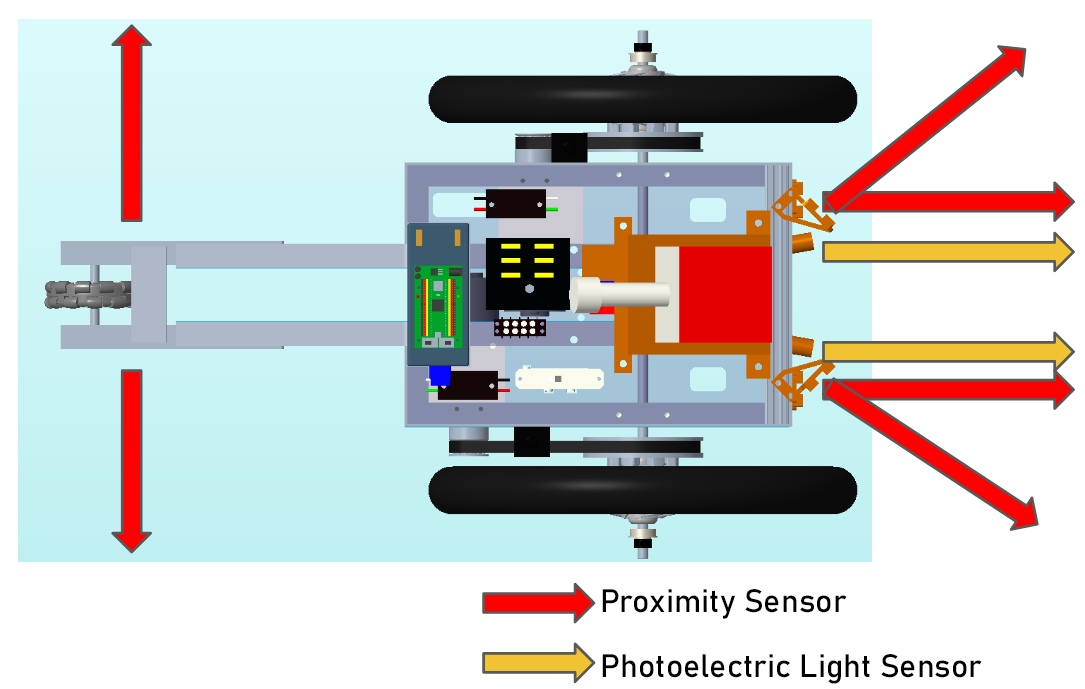
- Programmed arduino and sensors for electrical infrastructure
Results
- Successful autonomous navigation of obstacle course 33% faster than target time
- Simple and scalable manufacturing processes used only 66% of alotted budget
- Robust design capable of surviving 3+ feet drops
- Contact Me: [email protected]